𝙙𝙞𝙨𝗮𝗿𝗺𝗶𝗻𝗴 II
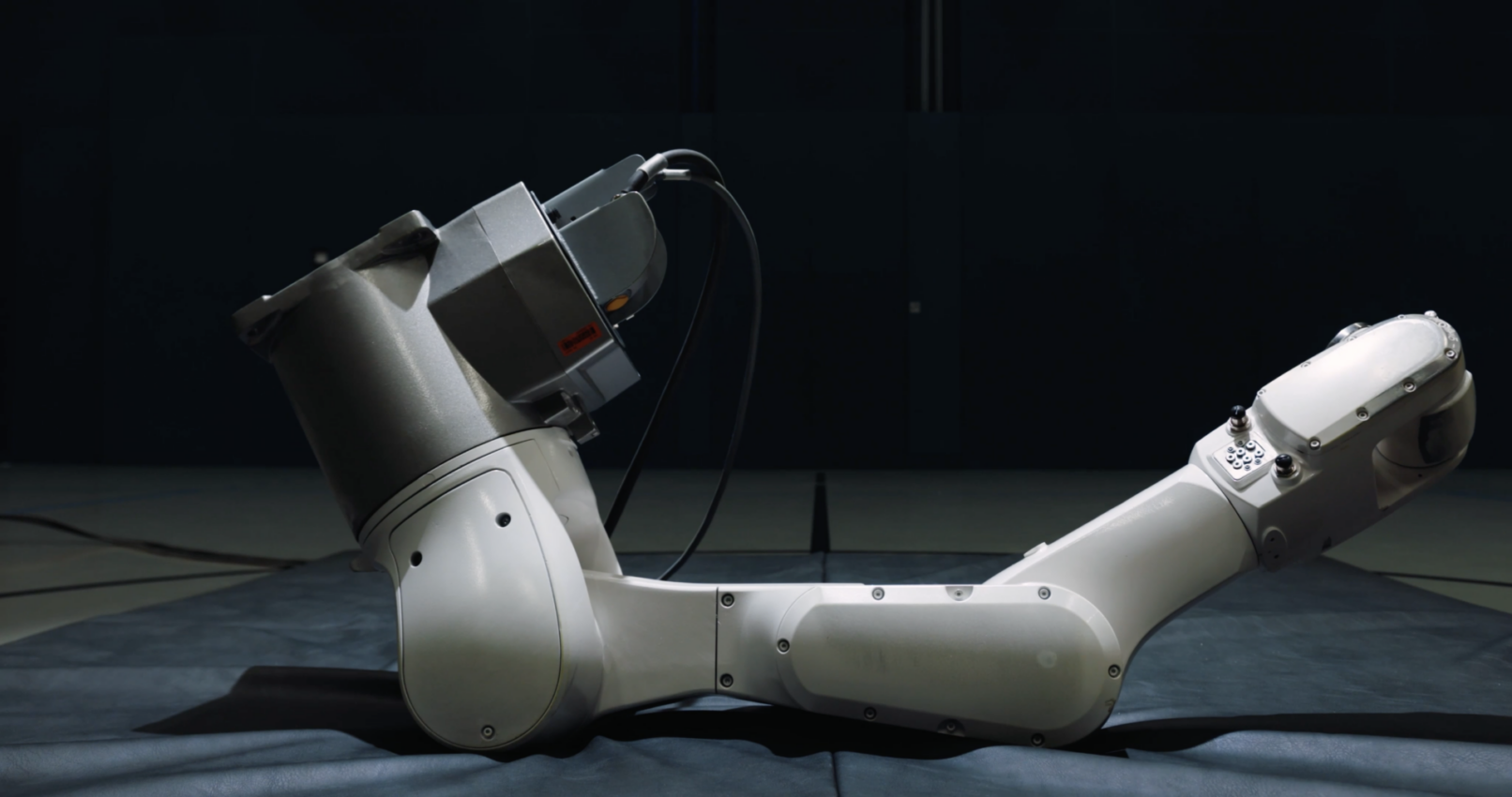
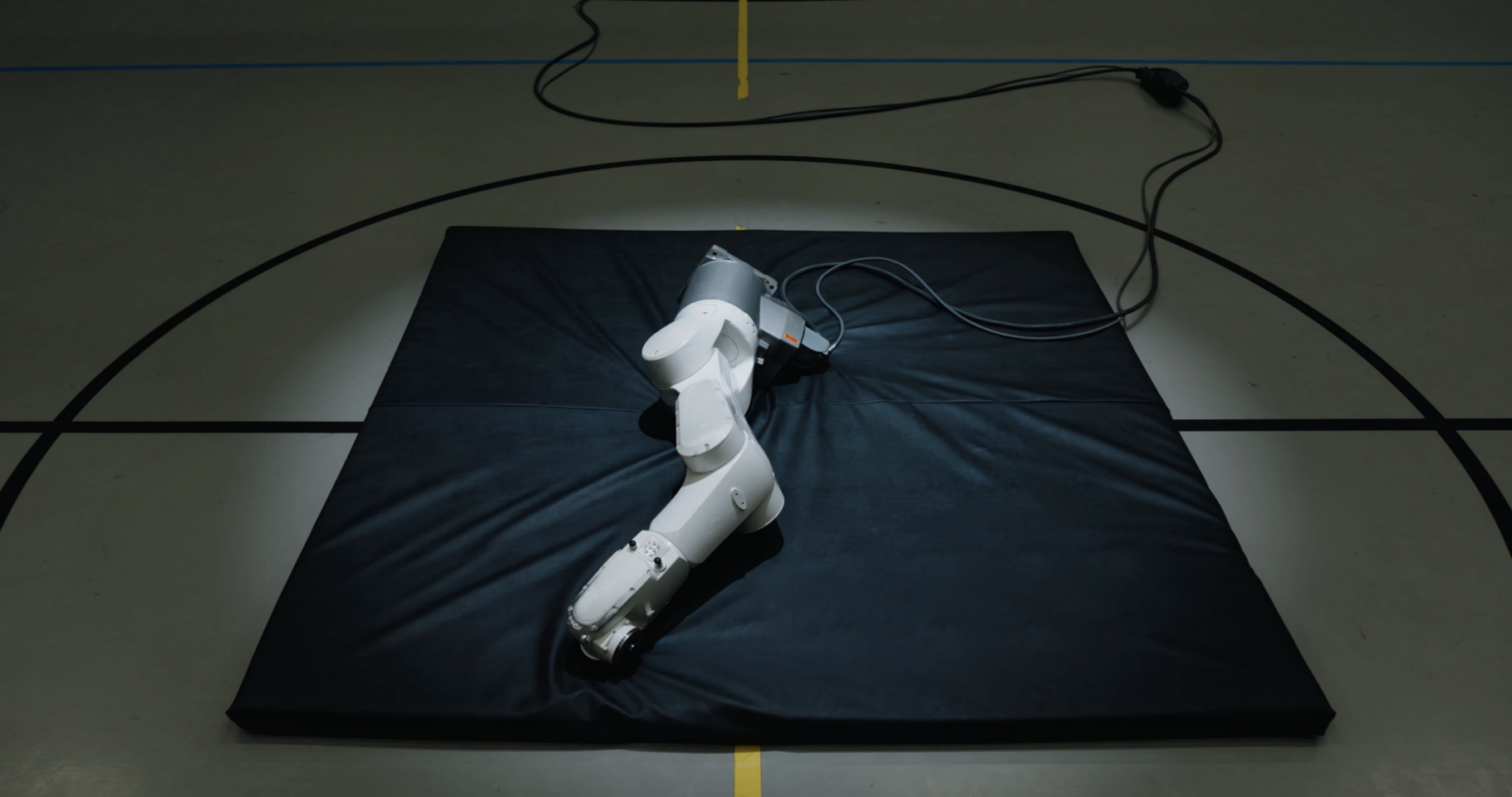
disarming is a series of performative explorations of the relation between a detached robotic arm, its artificial environment, and its human observers. In disarming II a freely placed industrial robotic arm durationally learns locomotion on a gym mat in relation to its embedded virtual concept of its body and environment. The work playfully navigates the ambiguity of disarming as a process of physical detachment and emotional attachment.
Locomotion can be seen as a primal (post-birth) instinct and ultimate act of independence. A robotic limb, somehow detached from a human-constructed technological body, tries to find concepts for advancing movements even though it initially wasn’t made for locomotion – vulnerable yet determined. Parallel to a familiar dystopian plot of technological autonomy and the feelings going with it, witnessing these first clumsy tries may awaken compassion or even a certain emotional bond.
The work picks up on the industry narrative that robots are becoming more and more autonomous with the help of machine learning. Over centuries, the ability to move independently has been considered a core criterion of autonomy. At one point, it was also considered a defining characteristic of being alive. Today, our definitions of autonomy and aliveness have evolved, but our inclination towards anthropomorphizing remains. Throughout the disarming series, each format and iteration features a different constellation in which a detached robotic arm continuously tries to learn how to move forward. In each setting, the learning is stretched and inefficient, creating a space to observe one’s projections and the diversity of relations emerging and transforming between involved entities.
disarming II is encounterable in two variations:
- Intra-active Installation (with an AI-driven robotic arm durationally learning)
- Intra-active Video Installation (with an AI continuously re-narrating the video cut)
Exhibited as video installation disarming fuses physical acting with digital observation and vice versa. The same Reinforcement Learning (RL) algorithm learning physical locomotions with the robotic body in the video footage now observes how likely recent social media postings mention “robot” and “arm” in the same post. In reference to this observation, the RL algorithm is set to continuously learn and unlearn how to edit the video scenes to decrease this human tendency.
For further background on the work, see this alt.HRI paper presented at the ACM/IEEE International Conference on Human-Robot Interaction by me, Magdalena Mayer, Amir Bastan, and Johannes Braumann: https://dl.acm.org/doi/10.5555/3721488.3721636
Core team
Emanuel Gollob – research, concept & production
Advice and support
Markus Krampl – video documentation
Amir Bastan – real-time robot control
Magdalena May – scenography
Creative Robotics – robotic hardware support
WRO ART Center team – curatorial and organizational support
Hardware | KUKA industrial robot arm | Mini PC | gym mat
Software | Reinforcement Learning | vvvv gamma | bunraku.xyz | Robot Sensor Interface
Acknowledgements | Supported by BC Gallery | This work was realised within the framework of a European Media Art Platform residency program at WRO Art Center with support from the Creative Europe Culture Programme of the European Union
References excerpt
Barad, Karen. Transmaterialities: Trans/matter/realities and queer political imaginings. GLQ: A Journal of Lesbian and gay Studies 21.2-3 (2015): 387-422.
Hayles, N. Katherine. Unthought: The power of the cognitive nonconscious. University of Chicago Press, (2017).
Hui, Yuk. Art and Cosmotechnics. University of Minnesota Press, (2021).
Penny, Simon. Making Sense: Cognition, Computing, Art, and Embodiment. The MIT Press (2017)
Riskin, Jessica. Genesis Redux: Essays in the History and Philosophy of Artificial Life. University of Chicago Press (2007)
Slager, Henk. The Pleasure of Research. Hatje Cantz Verlag (2015)